Gracias a nuestros patrocinadores, esta semana hemos recibido nuevo material electrónico, tanto para poder llevar componentes de repuesto a la competición, como para experimentas con otros sensores y ver si su fiabilidad es superior. Y en principio, así a sido.
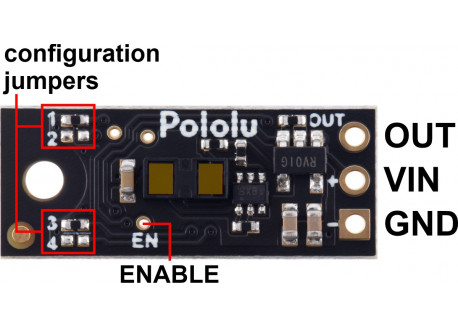
Uno de los sensores con el que hemos estado «jugando» a sido el sensor de Pololu 4071 basado en medir el desfase del rebote del la señal laser-ultravioleta que lanza. Teníamos nuestras dudas de si en una superficie de color negro la señal reflejada sería suficientemente intensa como para trabajar con ella, y en principio no hemos tenido ningún problema y ha funcionado de maravilla.
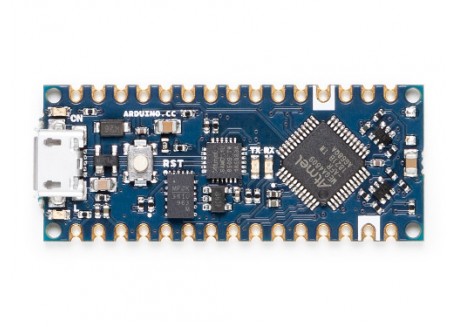
Viendo como funciona el sensor, hemos decidido que las mediciones se van a realizar con otro microcontrolador, el cual añadiremos al bus I2C, el nuevo Arduino Nano Evey . Este microcontrolador es compatible respecto a pines con el Nano clásico, añadiendo que dispone de interrupción en todos sus pines, lo que nos irá de perlas para poder leer tres de los anteriores sensores sin perder mucho tiempo de CPU.